AGV
RCS Control System
RCS란 (Real Control System) – AGV 통합 운영시스템으로 Main Computer를 통해 AGV의 위치, 속도, 상태정보등 실시간 통신하여 다수의 차량에 명령을 전달하고 실시간 데이터를 저장하며 교통제어 및 AGV 운영 및 이력 관리를 위한 시스템이다.
RCS 시스템 구성 및 기능
- MGS (Map Generation Software)
- LogViewer
- VVS (Virtual Vehicle Simulator)
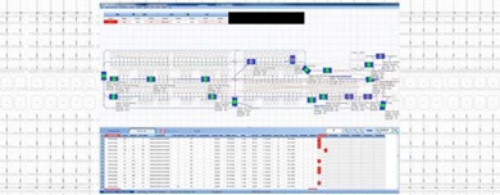
MGS
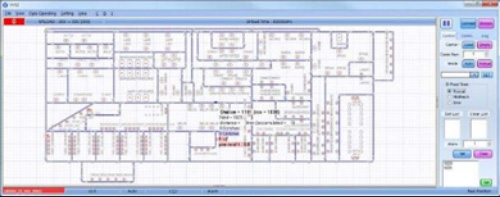
VVS
AGV 및 Guidance 방식
AGV란 Automatic Guided Vehicle 의 약자이며 지정된 경로를 통해 자동 주행하여 이동 하는 운반 시스템이다.
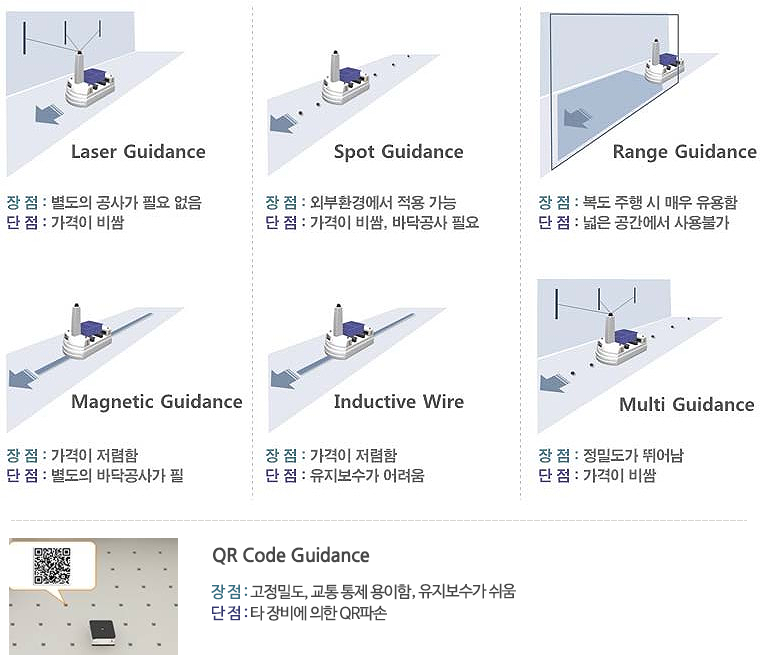
가이드(유도)방식
- Laser Guidance
- Spot Guidance
- Range Guidance
- Magnetic Guidance (추천)
- Inductive Guidance
- SUS Tape Guidance
- QR code Guidance
LGV (Laser Guidance) 방식
Laser Guidance
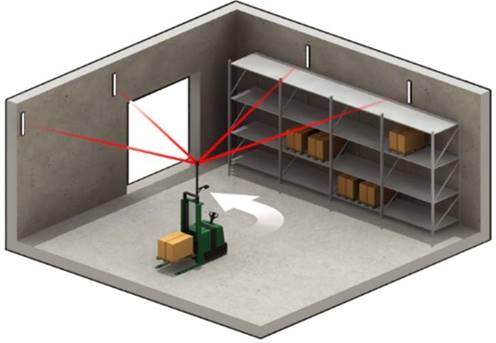
Description
Laser Navigation은 System내 좌표 값에 의해 Vehicle의 현재 위치가 결정되는 유도방식으로 Laser Scanner가 Reflector의 각도를 측정하고,
이 측정된 데이터가 조향 및 주행 Encoder 값과 함께 시스템 내 Vehicle의 상대 좌표 X, Y 값 그리고 Angle 값을 결정하는데 사용됨.
Laser Navigation을 적용하려면 우선, Vehicle이 주행하고 동작하는 구간에 필요한 만큼 다수의 Reflector를 설치해야 함.
그 다음 Reflector의 위치가 측량되면, LGV는 Laser Navigation 환경에서 주행 할 수 있음.
Navigation System
Laser scanner
- Reflector에 대한 거리 및 Angle 값 측정
- 최대 감지거리 35m

Reflectors
- 주변 구조물 및 벽면에 설치
- Cylindrical Type 적용

AGV Vehicle 방식
AGV 휠은 모터 동력을 전달하는 Vehicle(구동) Part와 방향을 결정하는 Steering(조향) Part가 있다.
이송하고자하는 제품과 현장 상황에 따라 구동과 조향 선택 방법을 결정한다.
구동(운전)방식
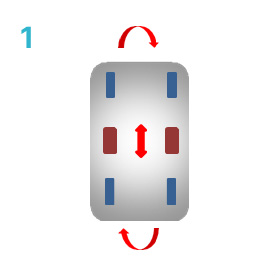
- DD : 모터구동축이 양옆에 배치됨
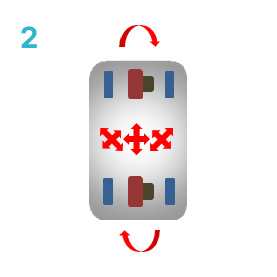
- QD : 구동, 조향 한세트로 차량의 앞뒤에 배치됨.
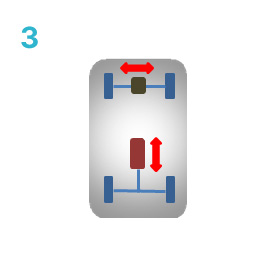
- AD : 디퍼런셜 기어를 부착한 타입으로 구동, 조향 별도로 전, 후에 배치됨. (Axle Drive)
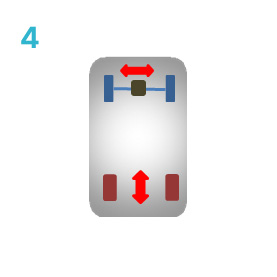
- RD : 전방 조향, 후방 DD의 혼합으로 배치됨.(Rear Drive)
* 제품과 현장 상황에 따른 합리적인 구동방식이 결정됨